

GEVCU Version 7
GEVCU Version 7
Open-source CAN-based vehicle control platform for advanced EV convers
Couldn't load pickup availability
GEVCU 7 is the latest version of an EVTV open source project to develop both the hardware and software to not only control the DMOC645/Siemens drive train, but virtually any modern AC drive train system once the CAN commands are known. It comes with support for DMOC645, CODA PowerPhase 100, Brusa DMC5, Rinehart Motion PM100, and C300 motor controllers. This upgraded version builds upon and expands the functionality of the GEVCU 6, while retaining the form factor.
This device serves as a Vehicle Control Unit for any electric vehicle and features very easy to use and very flexible configuration to deal with most throttle and brake combinations you may encounter. It is an extension of the Teensy MicroMod controller and is fully compatible with the Arduino IDE. It appears as a serial port in that environment and you can write and compile any software to operate this device.
Designed for advanced EV conversions needing flexible CAN control, expanded I/O, and integrated logging, making it ideal for custom EV, high-performance AC drive, and multi-device CAN projects. It is not for plug-and-play OEM replacements or beginner projects lacking CAN experience.
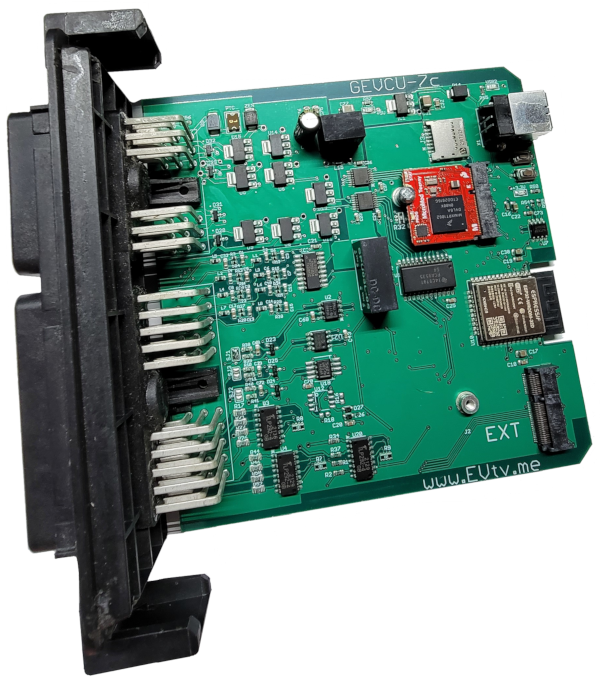
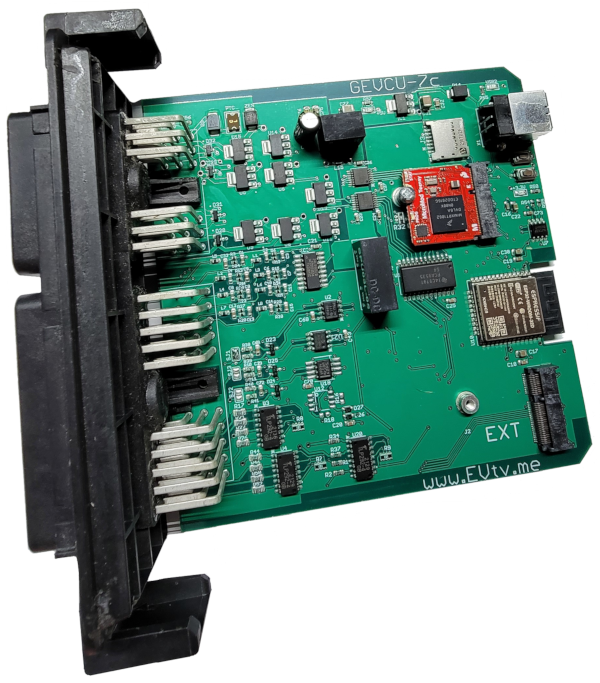
The new GEVCU utilizes a Teensy microcontroller, allowing for increased functionality, as well as an approximately 24x performance increase over the GEVCU6. The GEVCU 7 also has an additional CAN bus over the GEVCU 6, as well as additional analog and digital inputs. The ESP32 board also enables Bluetooth Classic and WiFi functionality, while retaining the Bluetooth LE functionality of the GEVCU 6. A MicroSD card slot has also been added, allowing for long-term data logging and firmware updates.
An open source software project already exists at https://github/collin80/GEVCU7, providing fully functional software to drive the DMOC645 and an ever increasing number of other devices. It is quite modular and object oriented allowing C++ skilled users to easily extend the function of this device ad-infinitum.
Use Cases
Designed for advanced EV conversions requiring flexible CAN control, expanded I/O, and integrated logging.
- Custom EV conversions
- Performance AC drive integrations
- Multi-device CAN systems
- Projects requiring flexible firmware control
Not Ideal For
- Plug-and-play OEM replacements
- Beginner projects without CAN experience
Additional Resources


Technical Specifications
| Processor | 600 MHz ARM Cortex-M7 Processor |
|---|---|
| Memory | 1MB RAM, 16 MB Flash |
| Interfaces | 3x CAN interfaces (including CAN-FD) Buffered analog inputs Buffered digital inputs USB Serial (UART) MicroSD data logging |
| Connectivity | WiFi and Bluetooth support via onboard ESP32 |
| Power | 12V nominal system voltage |
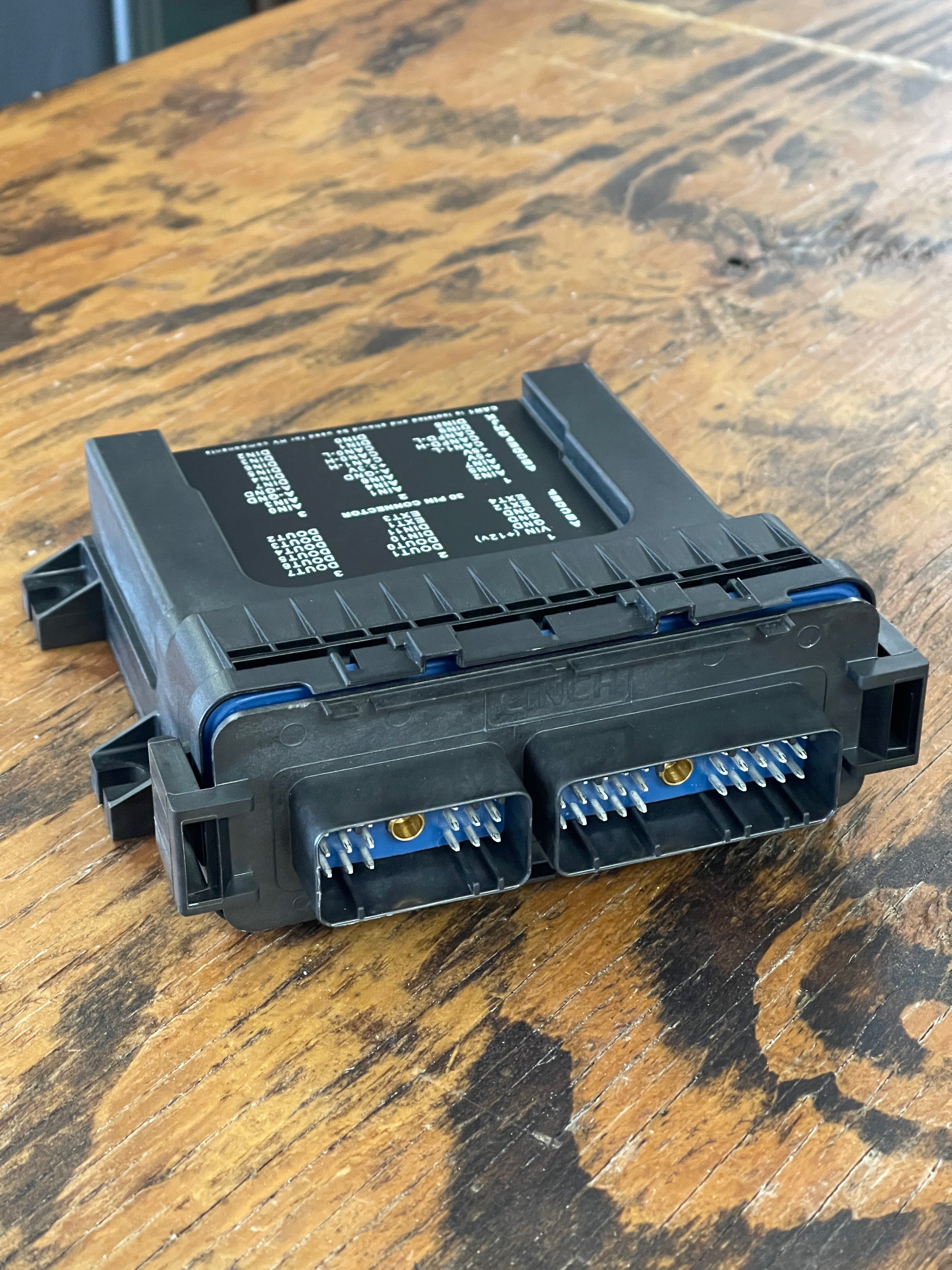
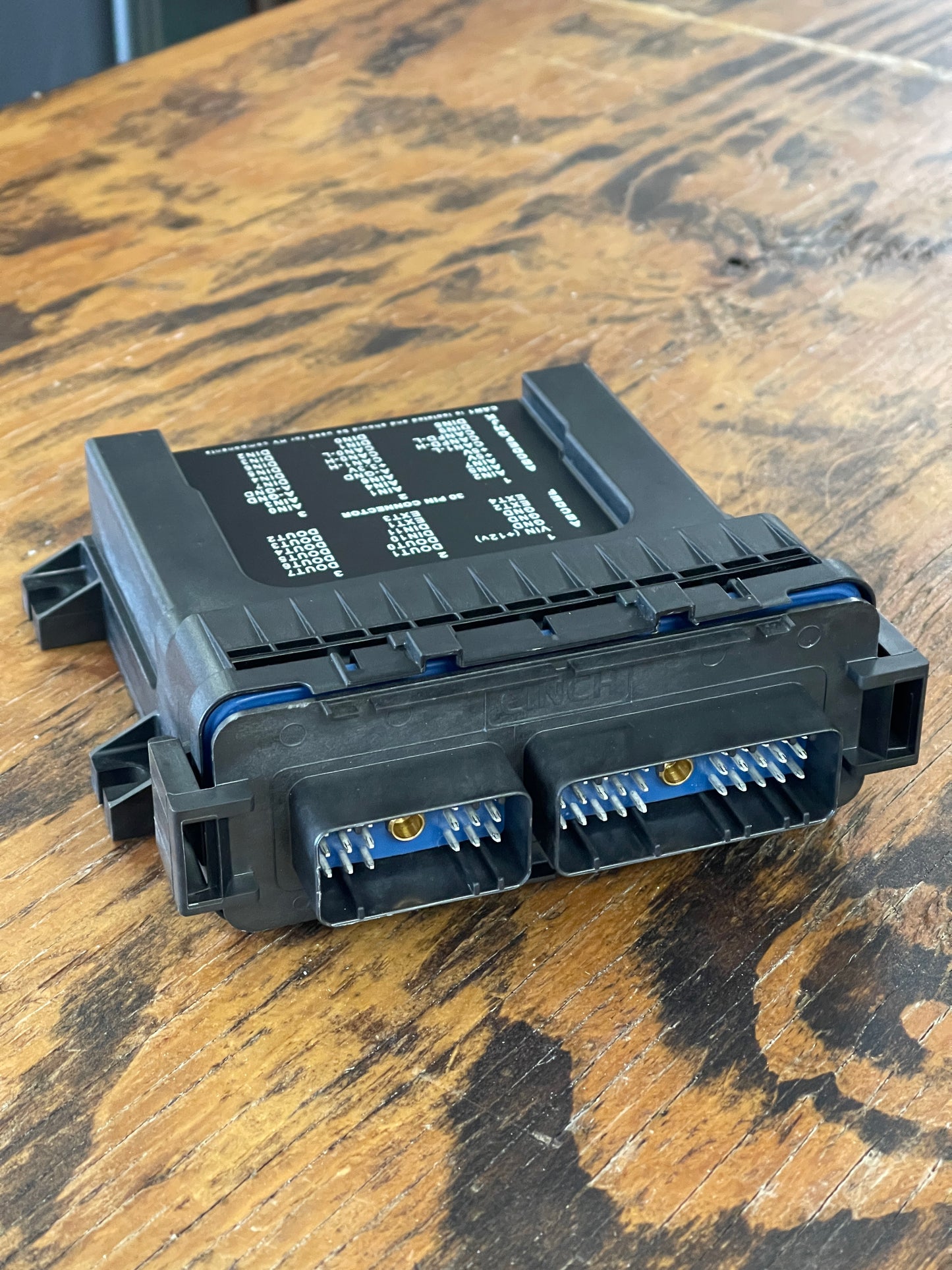
| Inputs | 12 Digital Inputs – 8x 12V, 4x 5V; 8 Analog Inputs – All 5V |
| Outputs | 8 Digital Outputs (Low Side), Onboard expansion port for future uses |